人类科技发展的终极目的是什么?答案是:解放自己。
车,作为科技发明一朵智慧之花,本质就是解放人类的双脚,实现快速移动的工具,最高追求就是:安全、舒适并准确抵达目的地。为此,人类努力了上百年,然而无论传统燃油车还是新能源车,技术上都未摆脱人工驾驶的束缚,直到阿维塔11的出现。
智驾新物种——阿维塔11出世
一场智驾会,在大量媒体和试驾人的见证下,阿维塔11展示了迄今为止最强大的智驾能力,没有之一。
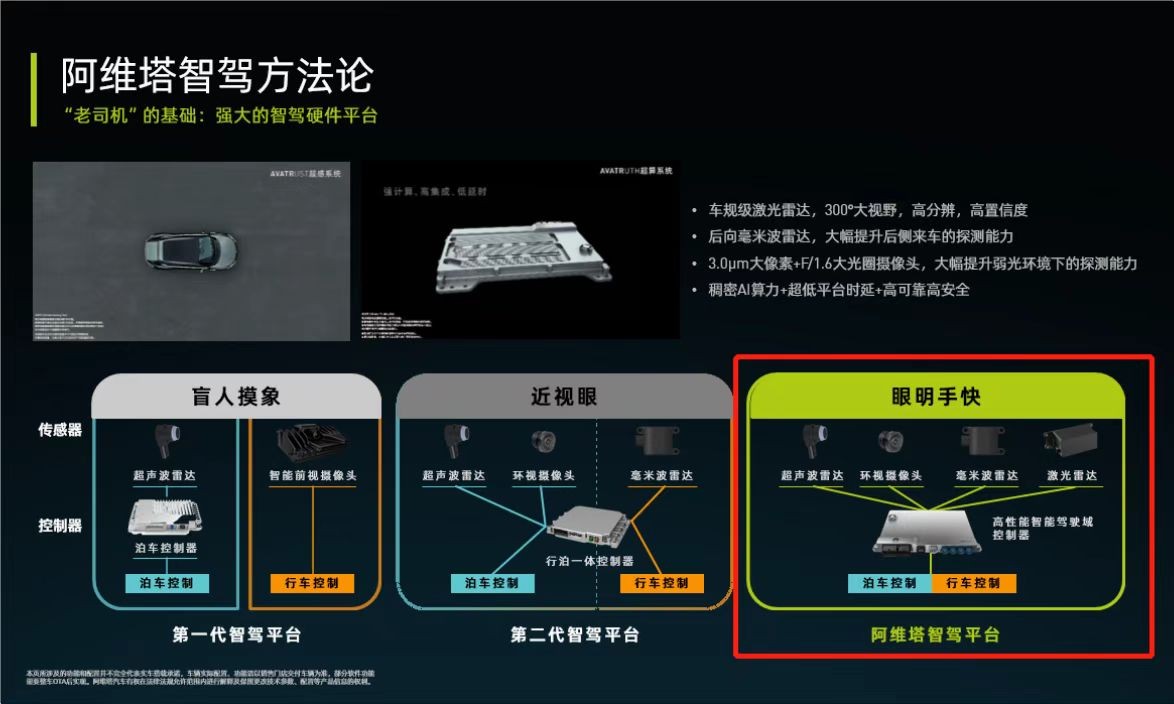
如果智驾能力有级别,现有已上市的各类智驾基本属于初级智能或者半智能水平,换言之处于一个“盲人摸象”到“近视眼”的发展阶段,其共同特点就是智驾系统尚未摆脱纯视觉+低算力的局限。
而阿维塔11跨越了这两个阶段,直接采用第三代智能驾驶系统。其特点是“眼”明“手”快,正如阿维塔智能驾驶专家董志华博士概括的那样:安全、舒适、认路,智驾接近真人思维阶段。
阿维塔11智驾系统三高超能力,解放驾驶员
车辆使用无外乎泊车或行车两种常用状态。而在这两种状态下阿维塔11的表现印证了如何解放驾驶员的智驾能力。支撑这一超能力的就是阿维塔11智驾系统拥有的高感知精准识别力、高算力算法支撑的判断力、高效控制的执行力。

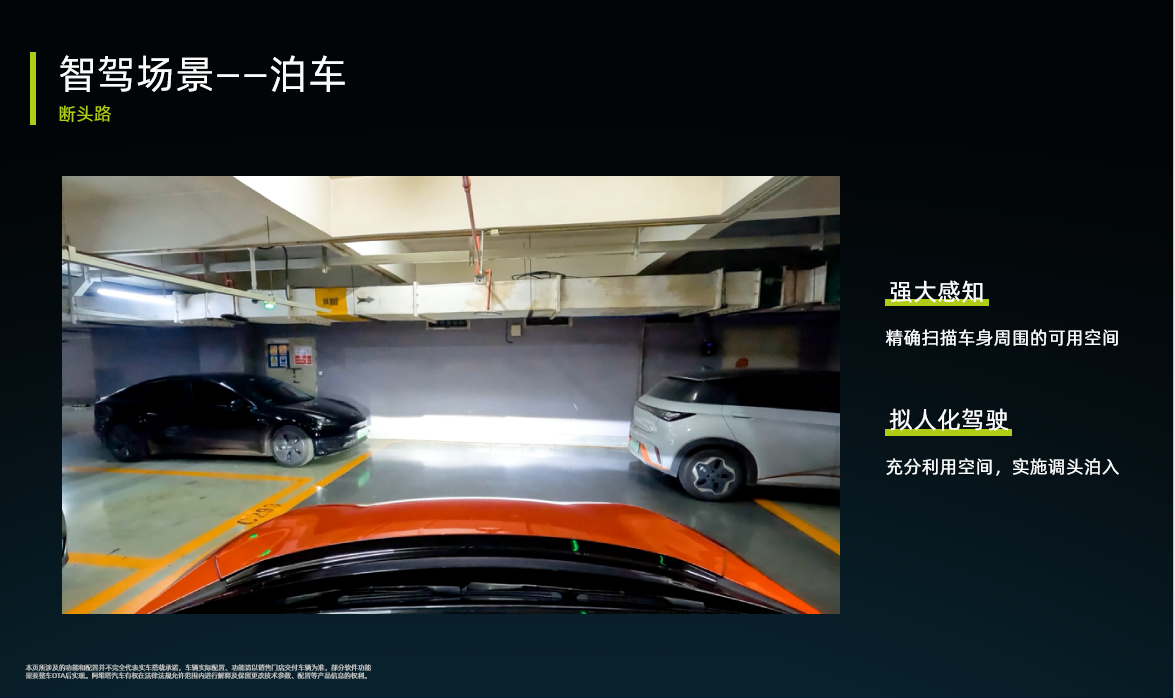
以泊车为例,在断头路车位泊入时,阿维塔11利用摄像头/激光雷达/毫米波雷达/超声波雷达等34颗智驾传感器构建起的多层独立感知防护体系,扫描整个车身周围360度的环境,预先实现对周围环境的全方位感知,能够达到对包括静态障碍物、动态VRU(弱势道路使用者)、动态车辆在内的各种物体的精确识别水准。
经过精准识别之后的感知信息传到AVATRUTH超算系统搭载的高性能智能驾驶计算平台是第二个关键步骤。
这是一台拟人化智能算法+高效算力+自进化学习能力的大脑,通过高超算力进行计算处理,做出准确判断,并引导车辆做出执行控制。所以,在AVATRUTH的指引之下,阿维塔11找到了一个最合适的目标停车位,并以一个180度的反向动作成功完成倒车入位。
相比之下,竞品车型如小鹏G9只能做到车位位置的预判,泊入操作需要人工直接操控,即所谓半智能状态。而其他车型甚至不能判断车位。
拟人化算法+赋能和更新,成就安全、舒适、认路智驾新时代
为什么阿维塔11能做到?
因为其智驾系统实现了智驾传感器的数据与泊车系统和行车系统之间的共享。三者高度融合为一个智能体系,这就是第三代智驾体系。
第一代智驾系统行车系统和泊车系统之间相互分离,数据不能共享,所以泊车时,感知和判断分离,又被称作“盲人摸象”型泊车。第二代虽然拥有行泊一体控制器,所有的传感器数据都会接入到这个控制器上,但是行车和泊车仍各自利用自己端网传感器的数据,没有实现大脑的融合,所以业内又称“近视眼”式泊车。
阿维塔11智驾系统就如人一样,利用感知系统感知周围信息,计算平台如大脑一样加工处理后判断,控制系统执行,并且控制系与计算平台也能交互,这样的智驾系统与人类思考逻辑更一致。
拥有这样一套与人类思维逻辑类似的智驾系统,阿维塔11在行车、斜坡、交互、超车、变道等场景下,都能做到方向控制自然、变道能力全面、交互体验丝滑、信息传递直观。而且智驾系统还会自动赋能和更新,越用越聪明。

阿维塔11的出现,不仅让车辆更加 “眼明手快”,阿维塔11的车主也能更早地收到如此高度“拟人化”智驾系统所带来的出行福利。
免责声明:市场有风险,选择需谨慎!此文仅供参考,不作买卖依据。
关键词: